Integrating NOVEL 15×15mm USB Cameras into Your Robotics:
Tips for Smooth Deployment
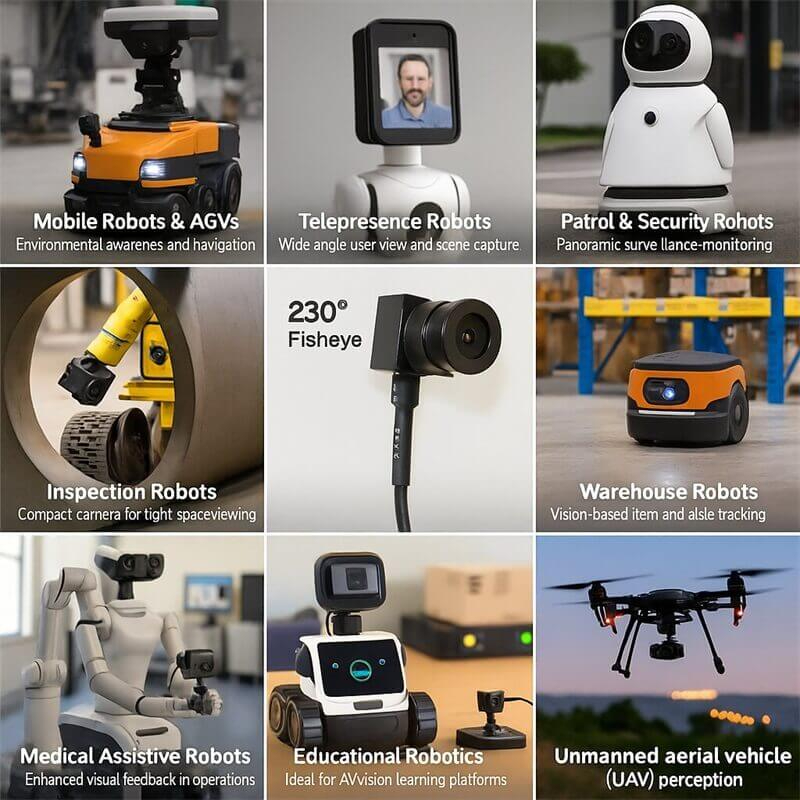
Robotics systems are becoming increasingly sophisticated, with vision playing a pivotal role in navigation, object detection, and quality control. Integrating compact, high-performance cameras is key to enhancing a robot’s capabilities without increasing size, weight, or power consumption.
Shenzhen Novel Electronics’ 15×15mm 2MP USB camera modules offer an ideal solution for robotics developers seeking a balance of image quality, ease of integration, and compactness. This article provides practical tips and best practices for integrating these micro USB cameras into your robotic projects smoothly and efficiently.

1. Understand Your Vision Requirements
Before selecting a camera module, define your project’s vision needs:
- Resolution and frame rate: Is 2MP at 30fps sufficient, or do you require higher specs?
- Field of view (FOV): Choose lens options (e.g., 90°, 110°) based on the robot’s tasks.
- Lighting conditions: Will the camera operate in low-light? Consider IR or external lighting.
- Latency tolerance: For real-time control, low-latency video is critical. USB 2.0 UVC cameras generally provide adequate performance.
Clear requirements help ensure you choose the right camera variant and lens configuration.
2. Mechanical Integration and Mounting
- Compact Size Advantage: The 15×15mm PCB size facilitates embedding cameras into small robot parts like end-effectors, grippers, or compact housings.
- Mounting Options: Use M8 or M12 lens mounts to secure lenses firmly. Consider vibration damping materials to reduce image blur.
- Cable Management: Plan USB cable routing to avoid interference and mechanical wear. Shielded cables help reduce noise.
Robust mechanical design ensures stable, consistent image capture in dynamic robotic environments.
3. Power and Data Connectivity
- USB 2.0 Interface: The camera supports UVC protocol, allowing plug-and-play connection to most embedded boards with USB host ports (e.g., NVIDIA Jetson, Raspberry Pi).
- Cable Length: Standard USB 2.0 cables limit you to ~5 meters. Use active USB extenders or hubs if longer runs are needed.
- Power Supply: USB power (5V) simplifies wiring; however, ensure stable power supply to avoid video dropouts.
4. Software Integration and Drivers
- UVC Compliance: Shenzhen Novel’s USB cameras are fully UVC compliant, which means no additional drivers are necessary on Windows, Linux, and many embedded OSes.
- SDK and APIs: Use popular vision libraries like OpenCV for image capture and processing. Shenzhen Novel Electronics provides sample code and integration guides upon request.
- Firmware Updates: Keep camera firmware up to date to leverage performance improvements and bug fixes.
5. Testing and Calibration
- Image Quality Testing: Verify focus, exposure, white balance under target lighting conditions.
- Latency Testing: Measure end-to-end delay to ensure responsiveness meets your control system requirements.
- Environmental Testing: Test under operating temperature ranges and vibration conditions to confirm robustness.
6. Troubleshooting Common Issues
- No Video Signal: Check USB connections, ensure the host recognizes the camera device.
- Image Noise or Artifacts: Verify cable quality and length; try shielding to reduce EMI.
- Driver or Software Conflicts: Use UVC-compliant standard drivers; avoid proprietary camera drivers when possible.
Why Choose Shenzhen Novel Electronics?
- Proven Experience: Our cameras power hundreds of robotics projects worldwide.
- Customization: Tailored lens, cable length, and firmware options to suit your project.
- Technical Support: Dedicated engineers assist with integration and troubleshooting.
- Quality and Reliability: Industrial-grade components ensure stable long-term operation.
Conclusion
Integrating 15×15mm USB camera modules (model Number: UC-501) into robotics projects offers a compact, high-quality vision solution with ease of deployment. By understanding your vision needs, planning mechanical and electrical integration carefully, and leveraging Shenzhen Novel Electronics’ support and UVC-compliant cameras, you can accelerate your robotics development with confidence.
Call to Action
Ready to add powerful vision to your robot?
Contact Shenzhen Novel Electronics for samples, SDKs, and technical support.
office@okgoobuy.com
www.okgoobuy.com/2mp-mini-usb-camera.html
